Introduction
Physical systems are described by differential equations. Newton’s second law, Electromagnetism, Circuits and Schrodinger’s equations are just a few examples. Differential equations are defined by their order: the highest derivative. Additionally a differential equation of some order  can be converted to a system of first order coupled differential equations and in general can be written as
can be converted to a system of first order coupled differential equations and in general can be written as
(1) 
(2) 
where  is a long vector known as the state vector,
is a long vector known as the state vector,  is the input vector (for example think of a muliport network that can be excited by applying voltages to its inputs.
is the input vector (for example think of a muliport network that can be excited by applying voltages to its inputs.  is the system output, which is a function of .
is the system output, which is a function of .
For many electrical engineering applications, the system of differential equations is built from the relations between current and voltages ( ).
).  ,
,  and
and  are almost always linear and do not change with time (time invariant). For circuits (and many other engineering systems) (1) takes the form
are almost always linear and do not change with time (time invariant). For circuits (and many other engineering systems) (1) takes the form
(3) 
and
(4) 
where now  and
and  are matrices.
are matrices.
Although the laws of physics in the language of differential equations, they have been obtained from observing and measuring quantities over short but non-infinitesimal intervals of times. Therefore, it is sometimes useful to go back from the differential equations to the underlying difference system of equations. Now instead of talking about instantaneous rate of changes, we talk about average rates. Integrating (3) over some time interval  leads to
leads to
(5) 
In the above equation  and
and  are the average values of and over
are the average values of and over  . If and are sufficiently smooth function then
. If and are sufficiently smooth function then
(6) 
(7) 
where  . Therefore (5) becomes
. Therefore (5) becomes
(8) 



In general if we know an initial state  at time
at time  then we divide the interval
then we divide the interval ![[0,t]](http://samehelnaggar.ca/wp-content/ql-cache/quicklatex.com-90e01491191ec1f4f923174ff69a7a73_l3.png "Rendered by QuickLaTeX.com") into sub-intervals with an increment of
into sub-intervals with an increment of  (see the figure above). This allows us +(in principle) to find
(see the figure above). This allows us +(in principle) to find  at
at  . In general if we labelled the state vector at each time instant by the increment
. In general if we labelled the state vector at each time instant by the increment  then
then
(9) 
where now is calculated at  : the mid point of the interval
: the mid point of the interval ![[t_{n-1} ~t_n]](http://samehelnaggar.ca/wp-content/ql-cache/quicklatex.com-a7089e30ed9bcc99297d4c817dc27e64_l3.png "Rendered by QuickLaTeX.com") . For simplicity we define
. For simplicity we define  and
and  to be
to be
(10) 
and
(11) 
This means that we can write (9) in terms of the newly defined matrices as
(12) 

Evolution of the state vector over time.
Equation (12) and the Figure above reveals the mechanism at which the state vector  evolves over time. evolves from the previous state
evolves over time. evolves from the previous state  through two basic linear operations: (1) Linearly transforming the state by the application of the linear operator and in addition (2) the linear mapping of the input vector and the event
through two basic linear operations: (1) Linearly transforming the state by the application of the linear operator and in addition (2) the linear mapping of the input vector and the event  .
.
As we will see later, the two transformations mainly depend on the properties of the system matrix  . In the next section, the input is turned off (i.e,
. In the next section, the input is turned off (i.e,  ). Therefore we will be interested in the behaviour of the matrix .
). Therefore we will be interested in the behaviour of the matrix .
Homogeneous case:
In this case
(13) 
or
(14) 
We Let  ,
,  . We also note that the \textbf{exponential} of a matrix
. We also note that the \textbf{exponential} of a matrix  is defined to be
is defined to be
(15) 
For our purposes it is sufficient to say that such matrix sequence converges. Therefore, if we divide the time interval ![[0~t]](http://samehelnaggar.ca/wp-content/ql-cache/quicklatex.com-7902172d81d5c090e4a21d72e2fae6db_l3.png "Rendered by QuickLaTeX.com") into an infinitely many sub-intervals one gets (
into an infinitely many sub-intervals one gets ( approaches
approaches  as increases).
as increases).
(16) 
Nonhomogeneous case, 
In this case we use the general form (9) and apply it iteratively at the time steps  . Note that at each time step depends on the previous value and
. Note that at each time step depends on the previous value and  . This means that depends on and \emph{all} previous inputs at
. This means that depends on and \emph{all} previous inputs at  . The dependency of on all the previous input values is nothing but the \textbf{convolution} operation. In fact it is easy to show that
. The dependency of on all the previous input values is nothing but the \textbf{convolution} operation. In fact it is easy to show that
(17) 
Note that
![\[\left[\left(\mathbf{I}-\frac{\Delta t}{2}\mathbf{A})\right)^{-1}\left(\mathbf{I}+\frac{\Delta t}{2}\mathbf{A})\right)\right]^{i-1}=e^{\tau_i\mathbf{A}}+\underbrace{O^i(\Delta t)}_\textnormal{remainder}.\]](http://samehelnaggar.ca/wp-content/ql-cache/quicklatex.com-574b02cf01f46af2212c09d0cb0b519e_l3.png "Rendered by QuickLaTeX.com")
Therefore (17) becomes
(18) 
Note that above is sampled at the points  .
.
If we divide the interval ![[0,~t]](http://samehelnaggar.ca/wp-content/ql-cache/quicklatex.com-87b85de835ea191db448edc655c82c85_l3.png "Rendered by QuickLaTeX.com") to infinitely many sub-intervals, i.e, letting
to infinitely many sub-intervals, i.e, letting  . Therefore,
. Therefore,
(19) 
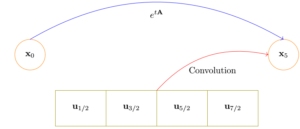
Convolution operator maps the inputs to the states.
The figure above shows how the state at final time  is related to the initial state and the history of the input . This is the convolution picture, where the dependency on the states has been encapsulated in the convolution operation.
is related to the initial state and the history of the input . This is the convolution picture, where the dependency on the states has been encapsulated in the convolution operation.